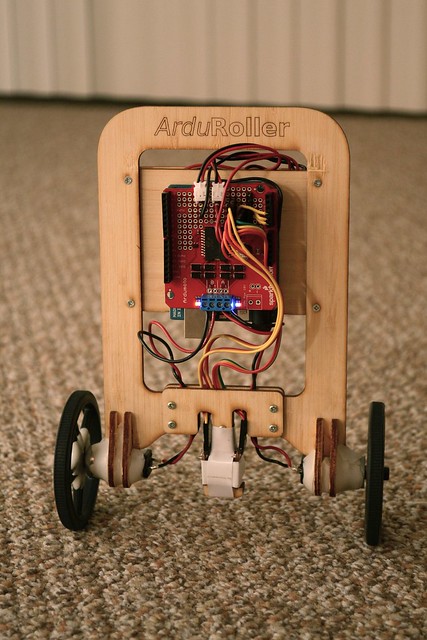
Second iteration of my ArduRoller balance bot with an all new wooden chassis.
Specs:
- Chassis: laser cut 2.7mm bamboo ply (Ponoko); various M2.5 machine screws from Amazon; Instamorph low-melt-point thermoplastic to fill in the gaps.
- Brains: 1 x Arduino Uno
- Motor driver: 1 x Sparkfun Ardumoto
- Motors: Sparkfun 2 x 24:1 gearmotor
- Wheels: 1 set Sparkfun 70mm -- repaired with Instamorph after they cracked around the axle
- Gyro: 1 x ADXRS613 (Sparkfun breakout) mounted at the axis of rotation
- Accelerometer: 1 x ADXL203CE (Sparkfun breakout) mounted at the axis of rotation
- Batteries: 2 x 3.7V Li-poly 850MAh (Sparkfun)
I've shared the code and assets at github.com/fasaxc/ArduRoller.
Video is at www.flickr.com/photos/fasaxc/5944650602/
Hey mate, i'm learning to play with the arduino hardware, and am going to attempt to remake your arduroller. Can I throw you questions everynow and then?
ReplyDelete